Technologie géospatiale dédiée à la cartographie et à la topographie, s'appuyant sur les systèmes GNSS, LiDAR et drones, qui transforme la collecte de données spatiales en résultats fiables.
Technologie de navigation développée par CHCNAV pour la navigation autonome, la robotique, l'exploitation minière, le secteur maritime et les systèmes industriels, s'appuyant sur les technologies GNSS et INS.
Qu'est-ce que la capture de la réalité ? De la numérisation 3D à la capture de la réalité 3D
2025-11-10
Qu'est-ce que la capture de la réalité ?
Il s'agit du processus de bout en bout qui consiste à transformer le monde physique en actifs numériques fiables. Un flux de travail de capture de la réalité combine des capteurs (LiDAR, caméras, IMU, GNSS) et des étapes logicielles (alignement, géoréférencement, QA/QC) pour produire un contenu mesurable - nuages de points, maillages, orthos, mises à jour BIM et jumeaux numériques.La capture de la réalité en 3D met l'accent sur les résultats tridimensionnels et géoréférencés, prêts pour la CAO/BIM/SIG et les décisions sur le terrain.
Un exemple actuel et éprouvé sur le terrain est le RS10 de CHC Navigation, un système portable qui combine GNSS RTK + LiDAR + SLAM visuel pour produire des nuages de points géoréférencés en temps réel pendant que vous marchez - à l'intérieur comme à l'extérieur. En d'autres termes, il associe la numérisation 3D rapide à la discipline complète de la capture de la réalité 3D, de sorte que les équipes quittent le site avec des données utilisables et localisées au lieu de "numériser maintenant, espérer plus tard".
Pourquoi le RS10 est important pour la capture de la réalité
Les scanners traditionnels sur trépied fournissent des détails millimétriques exquis, mais peuvent être lents sur des sites complexes et de grande taille. Le scanner RS10 comble cette lacune en combinant étroitement le positionnement RTK et le LiDAR-SLAM, ce qui permet aux équipes de terrain d'obtenir des résultats centimétriques et un retour d'information instantané.
Avec un flux de travail efficace sans boucle, le RS10 élimine la nécessité de fermer les boucles traditionnelles en intégrant les technologies GNSS et SLAM, ce qui simplifie la collecte de données sur le terrain et réduit le temps et les efforts nécessaires à l'achèvement du projet.
Le CHCNAV spécifie une précision absolue de ~5 cm et une précision relative de ~1 cm, avec des nuages de points géoréférencés en direct sur le contrôleur - vous pouvez donc voir la couverture en temps réel et corriger les lacunes avant de plier bagage. Il est possible de cartographier sur place de vastes zones allant jusqu'à ~13 000 m².
Cette continuité indoor↔outdoor est très importante pour les installations, les campus, les constructions mixtes, les services publics et les tunnels. Le RTK extérieur fournit des coordonnées absolues ; lorsque vous pénétrez à l'intérieur, le SLAM suit la trajectoire tout en restant dans le même système de coordonnées du projet, ce qui permet d'éviter une nouvelle géoréférence compliquée par la suite. Dans les zones sans GNSS (canyons urbains, sous-sols), le RS10 peut toujours calculer des coordonnées RTK précises, ce qui est utile lorsque vous devez placer des scanners au bon endroit, même en l'absence de satellites.
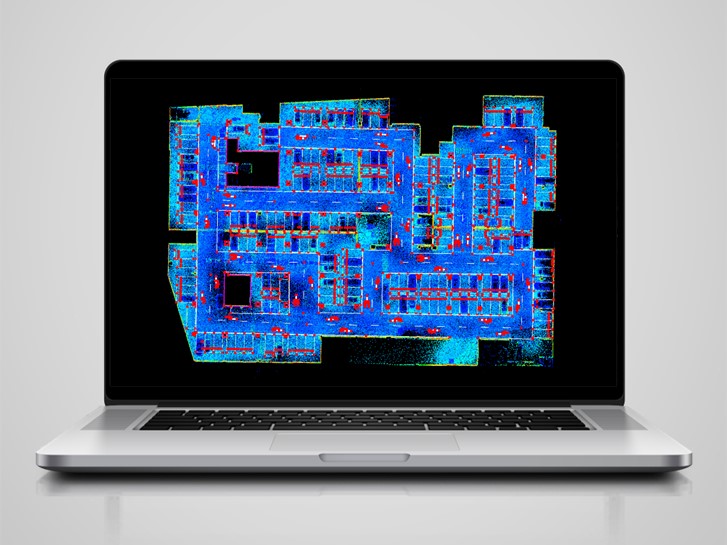
À gauche : un géomètre recueille des données dans un parking souterrain à l'aide d'un CHCNAV RS10. A droite : Les données sont traitées et visualisées dans le logiciel CoProcess.
Principales spécifications relatives aux performances de numérisation 3D
Pour les chercheurs qui comparent les systèmes portables, les caractéristiques du RS10 sont essentielles :
Options LiDAR : 16 lignes ou 32 lignes
Portée : 120 m ou 300 m
Vitesse de balayage : 320k ou 640k impulsions/s
FOV : environ 210° × 170° (jusqu'à 2 retours)
Imagerie : 3 caméras de 5 MP (15 MP au total)
Précision : < 5 cm en valeur absolue (H/V), < 1 cm en valeur relative
Robustesse : IP64
Alimentation : batteries remplaçables à chaud, ~60 min par pack
La flexibilité de montage est également importante pour les travaux rapides : le RS10 peut être porté à la main, monté sur la poitrine, sur un poteau ou sur un véhicule, de sorte qu'un seul système s'adapte aux couloirs, aux salles d'usine, aux longs extérieurs ou aux actifs linéaires sans qu'il soit nécessaire de procéder à un nouveau montage.
De la numérisation 3D à la capture complète de la réalité 3D
La différence entre la numérisation 3D et la capture de la réalité 3D réside dans ce qui se passe avant et après l'impact du laser sur la scène. Le RS10 illustre l'approche moderne :
Planifier la trajectoire, le système de coordonnées et le contrôle.
Capturez avec le GNSS+SLAM fusionné pour que chaque passage contribue à une trajectoire cohérente.
Voir les résultats en temps réel - un nuage de points géoréférencés apparaît au fur et à mesure que vous avancez, ce qui permet un contrôle qualité sur place (avez-vous atteint le noyau de l'escalier ? ce collecteur de tuyaux ?)
Fournissez des nuages de points/sections/maillages propres dans les systèmes CAD/BIM et GIS, avec les bonnes coordonnées dès le départ.
Le géoréférencement en temps réel est le point d'inflexion. Au lieu de découvrir une couverture manquante ou une dérive de retour au bureau, les équipes corrigent en quelques minutes alors qu'elles sont encore sur le site - ce qui est vital pour les fenêtres d'arrêt, les zones à accès limité et les coûts sur le terrain. Le CHCNAV RS10 fonctionne sans boucle, de sorte que vous n'êtes pas obligé de revenir aux mêmes endroits pour fermer les trajectoires - ce qui est pratique dans les espaces encombrés ou dangereux.
Là où il brille
Mises à jour de l'état d'avancement et du BIM : promenades rapides dans les intérieurs, les façades, les salles d'usine et les couloirs ; extraction de sections ou comparaison avec la conception le jour même.
Services publics et infrastructures linéaires : cartographiez les sous-stations, les galeries et les emprises sans avoir à sauter de trépied ; les supports de véhicules et de poteaux accélèrent les déplacements plus importants.
Foresterie/végétation et sites extérieurs : Couvrez rapidement le terrain tout en conservant des coordonnées cohérentes pour la détection des changements et les vérifications d'autorisation.
Zones souterraines et zones soumises aux contraintes du GNSS : continuez à construire un modèle cohérent même lorsque les satellites disparaissent, puis reliez-le avec précision au contrôle du site aux sorties.
Objectif d'achat pratique pour la capture de la réalité à la main
Si vous évaluez des outils de capture de la réalité, alignez votre liste de contrôle sur les contraintes du travail :
Précision ou rapidité : le Tripod TLS gagne encore en alignement millimétrique avec des tolérances serrées. Mais lorsque le calendrier, l'accès et la couverture dominent, le GNSS+SLAM portable vous permet d'obtenir rapidement un contexte fiable et prêt pour l'enquête. (La spécification < 5 cm en absolu / < 1 cm en relatif du RS10 est une référence utile).
Géoréférence en temps réel : Finir "sur le terrain" est important - assurez-vous que votre appareil prévisualise un nuage de points localisé et signale les lacunes en direct. Le RS10 est conçu autour de cette idée et prend en charge la cartographie en temps réel de ~13 000 m².
Montage et durée d'utilisation : recherchez des modes de transport multiples et des batteries remplaçables à chaud (environ 60 minutes par pack sur le RS10) pour éviter les baisses de productivité.
Écosystème de flux de travail : Examinez comment les données sont transférées dans votre pile CAO/BIM/SIG et si les applications de terrain aident à choisir les projections et à gérer les coordonnées de manière cohérente.
Conclusion
Le CHCNAV RS10 illustre l'évolution de la numérisation 3D vers la capture de la réalité 3D: GNSS RTK + SLAM pour la vérité des coordonnées, nuages de points géoréférencés en temps réel pour la certitude sur le terrain, et spécifications pratiques (LiDAR 16/32 lignes, jusqu'à 300 m de portée, IP64, batteries remplaçables à chaud) qui répondent aux exigences quotidiennes du site. Si vos projets se déroulent à l'intérieur et à l'extérieur et que vous souhaitez obtenir des résultats rapides et fiables, cette catégorie - et le RS10 en particulier - mérite de figurer sur votre liste de sélection.
____
À propos de CHC Navigation
CHC Navigation (CHCNAV) développe des solutions avancées de cartographie, de navigation et de positionnement conçues pour accroître la productivité et l'efficacité. Au service d'industries telles que le géospatial, l'agriculture, la construction et l'autonomie, CHCNAV fournit des technologies innovantes qui permettent aux professionnels de se prendre en charge et de faire progresser l'industrie. Avec une présence mondiale dans plus de 140 pays et une équipe de plus de 2 000 professionnels, CHC Navigation est reconnue comme un leader dans l'industrie géospatiale et au-delà. Pour plus d'informations sur CHC Navigation [Huace:300627.SZ], veuillez consulter : https://www.chcnav.com/about/overview
Vous avez une question sur nos solutions ou nos opportunités de distribution ?