Tecnología geoespacial para la cartografía y la topografía, basada en sistemas GNSS, LiDAR y UAV que convierten la captura de datos espaciales en resultados fiables.
Un flujo de trabajo de inspección en interiores más inteligente: Escaneado SLAM portátil con el CHCNAV RS7
2026-04-10
Los proyectos de renovación de interiores y as-built rara vez fallan durante la medición. Más a menudo, la incertidumbre aparece más tarde, cuando los registros incompletos del emplazamiento, los bocetos inconexos y la falta de contexto espacial empiezan a afectar a la redacción, la coordinación y las decisiones de diseño. Aquí es donde el escaneado SLAM manual está ganando terreno. El escáner SLAM de mano CHCNAV RS7 está diseñado para aplicaciones en edificios e interiores, ayudando a los equipos a capturar datos de alta densidad en interiores y avanzar más rápidamente hacia productos reutilizables. SLAM (localización y cartografía simultáneas) permite al escáner seguir su propia posición mientras construye una nube de puntos 3D en tiempo real, sin depender de señales GNSS ni de objetivos colocados previamente.
El cambio del flujo de trabajo: De las mediciones aisladas a un registro espacial reutilizable
Los flujos de trabajo tradicionales de los estudios en interiores siguen un patrón familiar. Un equipo llega al lugar con cintas métricas, distanciómetros láser y blocs de notas. Registran las dimensiones, esbozan los planos y fotografían los detalles clave. Se marchan con mediciones que luego hay que interpretar, volver a dibujar y cotejar con bocetos que pueden no contar toda la historia. Si se ha omitido una medida o no está clara la conexión de una habitación, es necesario volver a visitarla.
Un escáner LiDAR portátil cambia radicalmente esta dinámica. En lugar de recoger mediciones aisladas, el operador recorre el espacio y captura una nube de puntos 3D continua y de alta densidad. El resultado no es un conjunto de números que haya que reconstruir más tarde. Es un registro espacial que admite planos de planta, secciones, alzados, modelado BIM, coordinación del diseño y validación posterior, todo ello a partir del mismo conjunto de datos.
De este modo, la pregunta central pasa de "¿Hemos medido lo suficiente?" a "¿Cuánto podemos hacer con los datos que hemos capturado?" Una sola visita al emplazamiento se convierte en la creación de un activo 3D reutilizable, en lugar de un ejercicio de campo puntual.
El CHCNAV RS7 captura datos continuos de nubes de puntos 3D mientras el operador camina por espacios interiores, sustituyendo la medición manual por un registro espacial reutilizable.
Cómo afronta el RS7 los retos de la exploración en interiores
Seguimiento estable en espacios pobres en características
La calidad de la digitalización 3D en interiores depende en gran medida de la estabilidad de la trayectoria. El escáner debe seguir con precisión su propia posición mientras se desplaza por el edificio. Esto es sencillo en habitaciones con una geometría, mobiliario y características arquitectónicas bien definidas. En cambio, resulta más difícil en pasillos, huecos de escaleras, rutas de servicios públicos e interiores repetitivos en los que la geometría circundante ofrece puntos de referencia limitados para el algoritmo SLAM.
El CHCNAV RS7 soluciona este problema con una fusión de INS (sistema de navegación inercial) y el procesamiento SLAM, anclado por una IMU de alta precisión con una inestabilidad de sesgo mejor que 0,5 grados/hora. Esto significa que el escáner mantiene estables las estimaciones de trayectoria incluso en espacios geométricamente repetitivos, produciendo nubes de puntos más limpias con menos artefactos de alineación.
Completar la geometría interior en menos tiempo
La velocidad es importante en la captura de la realidad en interiores, pero sólo si la cobertura es completa. Si faltan techos, estructuras elevadas o esquinas estrechas, hay lagunas en el conjunto de datos, y las lagunas significan visitas de vuelta o conjeturas durante la redacción. La RS7 captura hasta 1,15 millones de puntos por segundo a través de un campo de visión ultraamplio de 360 x 189 grados. Esta cobertura casi esférica significa que los techos, las esquinas y los elementos elevados se capturan de forma natural mientras el operario camina, sin necesidad de detenerse, cambiar de posición o inclinar el dispositivo.
Para los operarios, esto significa también menos cambios de postura y menos interrupciones en los recorridos de exploración. El flujo de trabajo a pie sigue siendo fluido, lo que contribuye tanto a la calidad del escaneado como a la comodidad del operador durante sesiones de captura prolongadas.
De la geometría a los resultados visuales
La geometría en bruto es esencial, pero muchas partes interesadas en los proyectos también necesitan un contexto visual. Las cámaras duales HD de 12 MP con tecnología binning de Sony permiten al RS7 capturar imágenes de alta calidad incluso en interiores con poca luz. Estas imágenes se introducen en nubes de puntos coloreadas y 3D Gaussian Splatting (3DGS) a través del motor de renderizado HPGS 2.0, produciendo modelos visuales fotorrealistas junto con los datos geométricos.
Esta capa visual ayuda a los equipos a revisar los acabados, las aberturas, los accesorios y las zonas de circulación sin tener que volver a visitar el lugar. Esta combinación de geometría y contexto visual resulta especialmente valiosa para los proyectos de inspección de renovaciones, en los que las condiciones existentes deben comunicarse con claridad a diseñadores y contratistas.
Del campo a la oficina: Un flujo de trabajo de procesamiento conectado
Obtener datos de calidad sobre el terreno es sólo una parte del reto. El camino desde el escaneado en bruto hasta el producto final utilizable debe ser eficiente y estar bien respaldado. El RS7 se ajusta a un flujo de trabajo de procesamiento en tres pasos:
Planificación de rutas y adquisición de datos: el software SmartGo gestiona la recopilación de datos y proporciona una vista previa de la nube de puntos en tiempo real sobre el terreno, lo que permite a los operarios verificar la cobertura antes de abandonar el emplazamiento.
Optimizaciónde datos:CoPre y CoCloud se encargan de la optimización de las nubes de puntos, la georreferenciación, la coloración y el filtrado, preparando los datos brutos para su uso posterior.
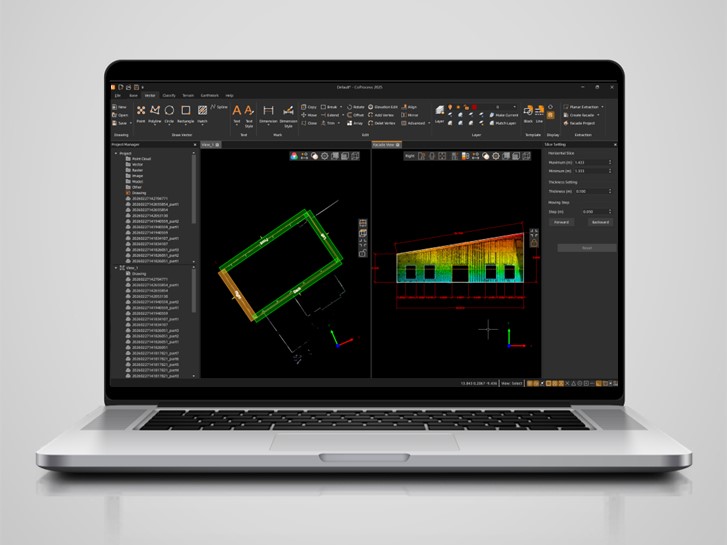
Vectorización de datos:CoProcess 2025 proporciona gestión de nubes de puntos, extracción de características y generación de entregables CAD (.dwg/.dxf), convirtiendo el registro espacial 3D en los planos de planta, secciones y modelos que necesitan los equipos de proyecto.
Este flujo de trabajo conectado significa que los datos capturados por el sistema de cartografía móvil de mano se mueven a través de una tubería compatible desde la adquisición sobre el terreno hasta el producto final, con cada etapa diseñada para trabajar con la salida del RS7.
Estudio de caso: Estudio de renovación de 900 metros cuadrados en 10 minutos
Un proyecto reciente en Indiana (EE.UU.) ha puesto a prueba el CHCNAV RS7. La tarea: capturar datos espaciales completos para una antigua instalación de piscina de 900m2 que se estaba convirtiendo en un aula deportiva cubierta polivalente. El proyecto fue gestionado por Renaissance Design Build, Inc, con el apoyo de escaneado de iGage Mapping Corporation.
Izquierda: Renovación de las instalaciones de una antigua piscina en Indiana, preparadas para su conversión en un aula polideportiva cubierta. Arriba a la derecha: Medición tradicional en interiores con cinta métrica, distanciómetros láser y croquis manuales. Abajo a la derecha: El levantamiento con el escáner SLAM portátil permite capturar nubes de puntos 3D completas en un solo recorrido para obtener una cartografía de interiores rápida y precisa.
La comparación entre el flujo de trabajo tradicional y el de RS7 fue significativa:
Métrica
Método tradicional
CHCNAV RS7
Tamaño de la tripulación
3 personas
1 operador
Equipo
Cinta métrica, láser, croquis de mano
Escáner SLAM de mano
Tiempo de adquisición de datos
~190 minutos (sólo fachada parcial)
10 minutos (captura de toda la escena)
Cobertura
Mediciones parciales
Nube de puntos 3D completa
Precisión
Variable (errores de transcripción manual)
Dentro de 1 cm
Mejora de la velocidad
19 veces más rápido con el RS7
El equipo tradicional empleaba aproximadamente 190 minutos en medir las dimensiones parciales de la fachada utilizando cinta, láser y bocetos a mano. Un solo operario con el RS7 completó la adquisición de datos de toda la escena en 10 minutos, capturando todo el interior con una precisión de 1 cm. La nube de puntos resultante proporcionó un registro espacial completo de la instalación, utilizable para planos de planta, secciones, elevaciones y coordinación del diseño de renovación.
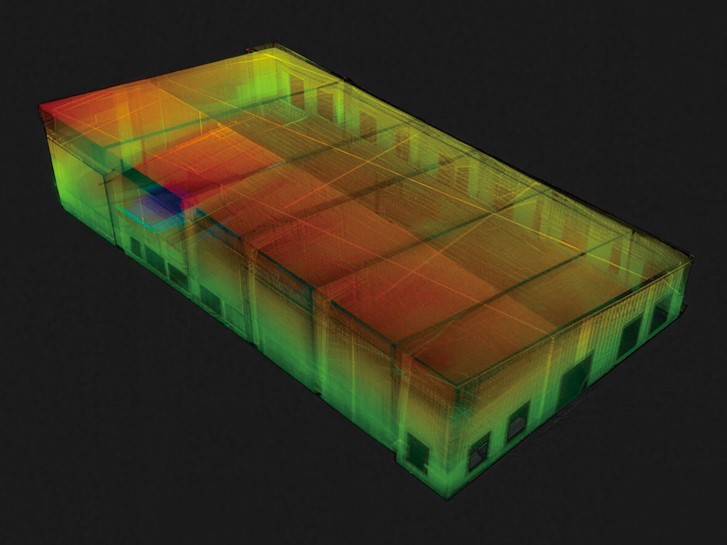
Nube de puntos coloreada de alta densidad de la instalación interior capturada con el RS7, procesada en el software CoProcess, que proporciona un registro espacial 3D completo y reutilizable.
Comparación del coste total de propiedad a 1 año
Más allá del ahorro de tiempo en un solo proyecto, el estudio de caso también examinó el coste total de propiedad a lo largo de todo un año de trabajo de inspección conforme a obra, suponiendo 24 proyectos anuales:
Factor de coste
Método tradicional
Flujo de trabajo del escáner RS7
Mano de obra y equipos anuales
252.000 $/año
(10 días x 3 equipos x 350 $/día x 24 proyectos)
37.200 $/año
(12.000 $ de equipamiento + 25.200 $ de mano de obra)
Ahorro anual
226.800 $ (85% de reducción de costes)
Periodo de amortización
1,27 proyectos
Las cifras reflejan un escenario en el que el escáner se amortiza en menos de dos proyectos. Para las empresas que gestionan varios proyectos de renovación, as-built o documentación de instalaciones al año, el caso de los costes es sencillo: la inversión en equipos se recupera casi inmediatamente, y cada proyecto posterior representa un ahorro directo en mano de obra y tiempo.
Convertir una visita a un emplazamiento en un activo 3D reutilizable
El valor de un escáner SLAM portátil para la topografía de interiores no reside simplemente en que sea más rápido que la cinta y el láser. La ventaja más profunda es estructural: cambia lo que produce una sola visita al lugar. En lugar de una colección de mediciones que sirven para un propósito, el resultado es un registro espacial completo que sirve para muchos.
Planos, secciones, alzados, modelos tridimensionales, documentos de coordinación del diseño y evaluaciones del estado futuro pueden derivarse del mismo conjunto de datos. Si surge una pregunta seis meses después de la visita a la obra, la nube de puntos sigue estando disponible para responderla. No hay necesidad de programar una nueva visita o confiar en la memoria de alguien sobre el espacio.
Para los equipos que trabajan en renovación, gestión de instalaciones, documentación del patrimonio o cualquier disciplina en la que las condiciones interiores deban capturarse con precisión y comunicarse con claridad, este cambio de mediciones de un solo uso a un activo 3D reutilizable reduce las visitas repetidas, acorta los plazos del proyecto y mejora la confianza en la entrega en general.
Revise la metodología detallada, los pasos del procesamiento de datos y las métricas de rendimiento del proyecto de escaneado de interiores de RS7: Descargar el estudio de caso completo de RS7.
____
Acerca de CHC Navigation
CHC Navigation (CHCNAV) desarrolla soluciones avanzadas de cartografía, navegación y posicionamiento diseñadas para aumentar la productividad y la eficacia.Presta servicio a sectores como el geoespacial, la agricultura, el control de máquinas y la autonomía,CHCNAV ofrece tecnologías innovadoras que capacitan a los profesionales e impulsan el avance de la industria.Con una presencia mundial que abarca más de 140 países y un equipo de más de 2.200profesionales, CHC Navigation es reconocida como líder en la industria geoespacial y más allá.Para más información sobre CHC Navigation [Huace:300627.SZ], visite: https: //www.chcnav.com/about/overview
¿Tiene alguna pregunta sobre nuestras soluciones u oportunidades de concesión?