屋内改修やas-builtプロジェクトでは、計測中に失敗することはほとんどない。それよりも、不完全な現場記録、断絶したスケッチ、欠落した空間コンテクストが、作図、調整、設計の決定に影響を及ぼし始めたときに、不確実性が後から現れることが多い。そこで、ハンドヘルドSLAMスキャンが注目を集めている。CHCNAV RS7ハンドヘルドSLAMスキャナーは、建物やインテリア用に設計されており、チームが高密度の屋内データを取得し、再利用可能な成果物をより迅速に作成できるよう支援します。SLAM (Simultaneous Localisation and Mapping) は、GNSS信号や事前に配置されたターゲットに依存することなく、スキャナーがリアルタイムで3D点群を構築しながら自身の位置を追跡することを可能にします。
ワークフローの転換:孤立した測定から再利用可能な空間記録へ
従来の屋内調査のワークフローは、おなじみのパターンに従っている。チームは巻尺、レーザー距離計、メモ帳を持って現場に到着する。寸法を記録し、レイアウトをスケッチし、主要な細部を撮影する。測定結果は後で解釈し、描き直し、スケッチと照合しなければならない。寸法を見逃したり、部屋のつながりが不明確だったりすると、再訪問が必要になる。
ハンドヘルドLiDARスキャナーは、このダイナミックな動きを根本的に変えます。孤立した測定値を収集する代わりに、オペレーターは空間内を歩き、連続した高密度の3D点群をキャプチャします。その結果は、後で再構築するための一連の数値ではありません。それは、as-builtの平面図、断面図、立面図、BIMモデリング、設計調整、および後の検証を、すべて同じデータセットからサポートする空間記録です。
これによって、核となる疑問が「十分に測定できたか」から「取得したデータでどれだけのことができるか」へとシフトする。
![内装リフォームのデータを取得するハンドヘルドSLAMスキャナー]() CHCNAV RS7は、オペレータが屋内空間を歩きながら連続的な3D点群データを取得し、手作業による計測を再利用可能な空間記録に置き換えます。
CHCNAV RS7は、オペレータが屋内空間を歩きながら連続的な3D点群データを取得し、手作業による計測を再利用可能な空間記録に置き換えます。
RS7はどのように屋内スキャンの課題に対応するか
特徴の乏しい空間における安定した追跡
屋内3Dスキャンの品質は、軌跡の安定性に大きく依存する。スキャナーは建物内を移動する際、自身の位置を正確に追跡しなければなりません。これは、明確な形状、家具、建築的特徴のある部屋では簡単です。廊下、階段の吹き抜け、ユーティリティ・ルート、反復的な内装など、周囲の形状がSLAMアルゴリズムに提供する基準点が限られている場合は、より難しくなります。
CHCNAV RS7は、0.5deg/h以上のバイアス不安定性を持つ高精度IMUに支えられたINS(慣性航法システム)とSLAM処理の融合により、この問題に対処している。これにより、スキャナーは幾何学的な繰り返し空間でも安定した軌道推定を維持し、アライメントアーチファクトの少ない、よりクリーンな点群を生成します。
より短い時間で完全な内部幾何学
屋内リアリティ・キャプチャにおいてスピードは重要だが、それはカバレッジが完全である場合に限られる。天井や頭上の構造物、狭いコーナーが欠落していると、データセットにギャップが生じ、ギャップがあると、作図中に再度訪問したり、当てずっぽうで作図したりすることになります。RS7は、360度×189度の超ワイドな視野で、毎秒最大115万ポイントをキャプチャします。このほぼ真球に近い視野は、天井、コーナー、頭上の要素を、オペレータが歩きながら自然にキャプチャできることを意味し、デバイスを止めたり、位置を変えたり、傾けたりする必要はありません。
これはオペレーターにとって、姿勢の変化やスキャンパスの中断が少ないことを意味します。ウォークスルーのワークフローは流動的で、長時間のキャプチャセッションでもスキャン品質とオペレーターの快適性の両方に貢献します。
ジオメトリからビジュアルな成果物へ
生のジオメトリは不可欠ですが、多くのプロジェクト関係者は視覚的なコンテキストも必要とします。ソニーのビニング技術を採用したデュアル12MP HDカメラにより、RS7は低照度の屋内環境でも高品質の画像をキャプチャできます。この画像は、HPGS 2.0レンダリングエンジンを通して、カラー化された点群および3Dガウススプラッティング(3DGS)に送られ、形状データとともにフォトリアリスティックなビジュアルモデルを生成します。
このビジュアルレイヤーにより、チームは現場を再訪することなく、仕上げ、開口部、備品、循環エリアを確認することができます。既存状況を設計者や請負業者に明確に伝える必要がある改修調査プロジェクトでは、このジオメトリとビジュアルコンテキストの組み合わせが特に役立ちます。
現場からオフィスへ:接続処理ワークフロー
現場で質の高いデータを取得することは、課題の一部に過ぎない。生スキャンから使用可能な納品物までの経路は、効率的で十分にサポートされていなければなりません。RS7は、3段階の処理ワークフローに適合します:
- ルートプランニングとデータ収集:SmartGoソフトウェアがデータ収集を行い、現場でのリアルタイム点群プレビューを提供します。
- データの最適化: CoPreとCoCloudが点群の最適化、ジオリファレンス、カラー化、フィルタリングを行い、生データを下流での使用に備えます。
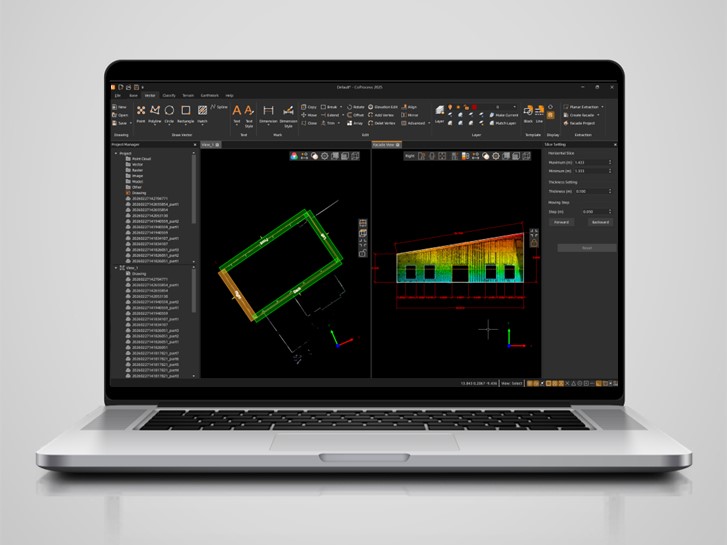
- データのベクトル化: CoProcess 2025は、点群管理、フィーチャー抽出、CAD デリバラブル生成(.dwg/.dxf)を行い、3D 空間記録をプロジェクトチームが必要とする平面図、断面図、モデルに変換します。
この接続されたワークフローは、ハンドヘルドモバイルマッピングシステムで取得されたデータが、現場取得から最終成果物まで、サポートされたパイプラインを通り、各ステージがRS7の出力と連動するように設計されていることを意味します。
ケーススタディ10分で900平方メートルのリノベーション調査
米国インディアナ州で最近行われたプロジェクトで、CHCNAV RS7が実用的なテストを受けました。900m2のスイミングプール跡地を多目的屋内スポーツ教室に改築するというもの。このプロジェクトはルネッサンス・デザインビルド社が担当し、iGage Mapping Corporationがスキャニングをサポートした。
![インディアナ州にあるプール施設の改修跡地]() 左:インディアナ州の元プール施設を改修し、多目的屋内スポーツ教室にするための準備。右上:巻尺、レーザー距離計、手書きスケッチを使った従来の屋内測量。右下:ハンドヘルドSLAMスキャナーを使用した測量では、1回のウォークスルーで完全な3D点群データを取得できるため、迅速かつ正確な屋内マッピングが可能。
左:インディアナ州の元プール施設を改修し、多目的屋内スポーツ教室にするための準備。右上:巻尺、レーザー距離計、手書きスケッチを使った従来の屋内測量。右下:ハンドヘルドSLAMスキャナーを使用した測量では、1回のウォークスルーで完全な3D点群データを取得できるため、迅速かつ正確な屋内マッピングが可能。
従来のワークフローとRS7ワークフローの比較は有意であった:
| 指標 |
従来の方法 |
CHCNAV RS7 |
| クルーサイズ |
3名 |
オペレーター1名 |
| 機材 |
巻尺、レーザー、ハンドスケッチ |
ハンドヘルドSLAMスキャナー |
| データ取得時間 |
~190分(部分的なファサードのみ) |
10分(フルシーンキャプチャ) |
| 測定範囲 |
部分計測 |
完全な3D点群 |
| 精度 |
可変(手動転写エラー) |
1cm以内 |
| スピードの向上 |
RS7で19倍高速化 |
従来の作業員は、テープ、レーザー、手書きスケッチを使用して、ファサードの部分的な寸法測定におよそ190分を費やしていました。RS7を使用するオペレーター1名は、10分でフルシーンのデータ取得を完了し、内部全体を1cm以内の精度でキャプチャしました。得られた点群データは、施設の完全な空間記録となり、平面図、断面図、立面図、改修設計の調整などに利用できる。
![CAD成果物のためのCoProcessソフトウェアでの点群ベクトル化]()
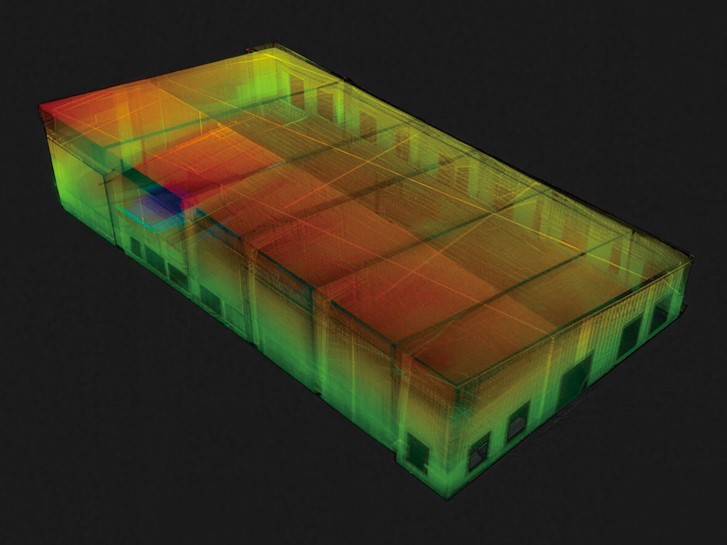
![CAD成果物のためのCoProcessソフトウェアでの点群ベクトル化]() RS7で撮影した屋内施設の高密度カラー点群データをCoProcessソフトウェアで処理し、完全で再利用可能な3D空間記録を提供。
RS7で撮影した屋内施設の高密度カラー点群データをCoProcessソフトウェアで処理し、完全で再利用可能な3D空間記録を提供。
1年間の総所有コスト比較
このケーススタディでは、1つのプロジェクトにおける時間短縮だけでなく、年間24件のプロジェクトを想定し、1年間のas-built調査作業における総所有コストも調査した:
| コスト係数 |
従来の方法 |
RS7 スキャナーワークフロー |
| 年間人件費と設備費 |
252,000ドル/年
(10日×3クルー×350ドル/日×24プロジェクト) |
年間37,200ドル
(設備12,000ドル+人件費25,200ドル) |
| 年間節約額 |
226,800ドル(85%のコスト削減) |
| 投資回収期間 |
1.27プロジェクト |
この数字は、スキャナーが2プロジェクト未満で投資回収できるシナリオを反映しています。1年に複数の改修工事、竣工図作成、設備文書作成プロジェクトを手がける企業にとって、このコストケースは単純明快です。
一度の訪問を再利用可能な3Dアセットに変える
屋内調査におけるハンドヘルドSLAMスキャナーの価値は、単にテープやレーザーよりも速いということではない。より深い利点は構造的なものである。一度の訪問で得られるものが変わるということです。一つの目的を果たす測定の集まりではなく、多くの目的を果たす完全な空間記録が出力されるのです。
平面図、断面図、立面図、3Dモデル、設計調整文書、将来の状態評価など、すべてを同じデータセットから得ることができる。現場視察の6ヵ月後に疑問が生じた場合でも、点群データから回答が得られます。再訪問のスケジュールを組んだり、その空間に関する誰かの記憶に頼ったりする必要はない。
改修、施設管理、遺産の文書化など、室内の状況を正確に把握し、明確に伝える必要がある分野のチームにとって、1回きりの測定から再利用可能な3D資産への移行は、再度の訪問を減らし、プロジェクトのスケジュールを短縮し、納品の信頼性を全面的に向上させます。
RS7インドアスキャニングプロジェクトの詳細な方法論、データ処理ステップ、パフォーマンス指標をご覧ください:RS7のケーススタディをダウンロードする。
____
CHCナビゲーションについて
CHC Navigation (CHCNAV) は、生産性と効率の向上を目的とした先進的なマッピング、ナビゲーション、ポジショニング・ソリューションを開発しています。地理空間、農業、機械制御、オートメーションなどの業界にサービスを提供しています、CHCNAVは、プロフェッショナルに力を与え、業界の発展を促進する革新的なテクノロジーを提供しています。世界140カ国以上で事業を展開し、2,200人以上のプロフェッショナルを擁しています。CHCナビゲーションは、地理空間業界およびそれ以外の業界におけるリーダーとして認められています。CHCナビゲーション[Huace:300627.SZ]の詳細については、https://www.chcnav.com/about/overview。