CHC Navigation offers advanced GPS/GNSS machine control systems for excavators, dozers, graders, and compactors. Improve accuracy, cut costs, and complete construction projects faster with reliable global support.
We offer tractor guidance and auto-steering systems for farms of any size, powered by GPS farming technologies. Improve your precision agriculture practices with smart agriculture solutions starting today.
A Smarter Indoor Survey Workflow: Handheld SLAM Scanning with the CHCNAV RS7
2026-04-10
Indoor renovation and as-built projects rarely fail during measurement. More often, uncertainty appears later, when incomplete site records, disconnected sketches, and missing spatial context begin to affect drafting, coordination, and design decisions. This is where handheld SLAM scanning is gaining ground. The CHCNAV RS7 handheld imaging laser scanner is designed for building and interior applications, helping teams capture high-density indoor data and move more quickly toward reusable deliverables. SLAM (Simultaneous Localisation and Mapping) allows the scanner to track its own position while building a 3D point cloud in real time, without relying on GNSS signals or pre-placed targets.
The Workflow Shift: From Isolated Measurements to a Reusable Spatial Record
Traditional indoor survey workflows follow a familiar pattern. A team arrives on site with tape measures, laser distance meters, and notepads. They record dimensions, sketch layouts, and photograph key details. They leave with measurements that must later be interpreted, redrawn, and cross-checked against sketches that may not tell the whole story. If a dimension was missed or a room connection was unclear, a return visit becomes necessary.
A handheld LiDAR scanner changes this dynamic fundamentally. Instead of collecting isolated measurements, the operator walks through the space and captures a continuous, high-density 3D point cloud. The result is not a set of numbers to be reconstructed later. It is a spatial record that supports as-built floor plans, sections, elevations, BIM modelling, design coordination, and later validation, all from the same dataset.
This shifts the core question from "Did we measure enough?" to "How much can we do with the data we captured?" A single site visit becomes the creation of a reusable 3D asset, rather than a one-time field exercise.
The CHCNAV RS7 captures continuous 3D point cloud data as the operator walks through indoor spaces, replacing manual measurement with a reusable spatial record.
How the RS7 Handles Indoor Scanning Challenges
Stable Tracking in Feature-Poor Spaces
Indoor 3D scanning quality depends heavily on trajectory stability. The scanner must accurately track its own position as it moves through the building. This is straightforward in rooms with distinct geometry, furniture, and architectural features. It becomes more difficult in corridors, stairwells, utility routes, and repetitive interiors where the surrounding geometry offers limited reference points for the SLAM algorithm.
The CHCNAV RS7 mobile laser scanner addresses this with a fusion of INS (Inertial Navigation System) and SLAM processing, anchored by a high-precision IMU with bias instability better than 0.5 deg/h. This means the scanner maintains stable trajectory estimates even in geometrically repetitive spaces, producing cleaner point clouds with fewer alignment artefacts.
Complete Interior Geometry in Less Time
Speed matters in indoor reality capture, but only if coverage is complete. Missing ceilings, overhead structures, or tight corners mean gaps in the dataset, and gaps mean return visits or guesswork during drafting. The RS7 laser scanner captures up to 1.15 million points per second through an ultra-wide 360 x 189 degree field of view. This near-spherical coverage means ceilings, corners, and overhead elements are captured naturally as the operator walks, without needing to stop, reposition, or tilt the device.
For operators, this also means fewer posture changes and fewer interrupted scan paths. The walk-through workflow remains fluid, which contributes to both scan quality and operator comfort during extended capture sessions.
From Geometry to Visual Deliverables
Raw geometry is essential, but many project stakeholders also need visual context. Dual 12 MP HD cameras with Sony binning technology allow the RS7 to capture high-quality imagery even in low-light indoor environments. This imagery feeds into colorised point clouds and 3D Gaussian Splatting (3DGS) through the HPGS 2.0 rendering engine, producing photorealistic visual models alongside the geometric data.
This visual layer helps teams review finishes, openings, fixtures, and circulation areas without revisiting the site. For renovation survey projects, where existing conditions must be communicated clearly to designers and contractors, this combination of geometry and visual context is particularly valuable.
From Field to Office: A Connected Processing Workflow
Capturing quality data in the field is only part of the challenge. The path from raw scan to usable deliverable must be efficient and well-supported. The RS7 fits within a three-step processing workflow:
Route planning and data acquisition: SmartGo software handles data collection and provides real-time point cloud preview in the field, allowing operators to verify coverage before leaving the site.
Data optimisation:CoPre and CoCloud handle point cloud optimisation, georeferencing, colorisation, and filtering, preparing the raw data for downstream use.
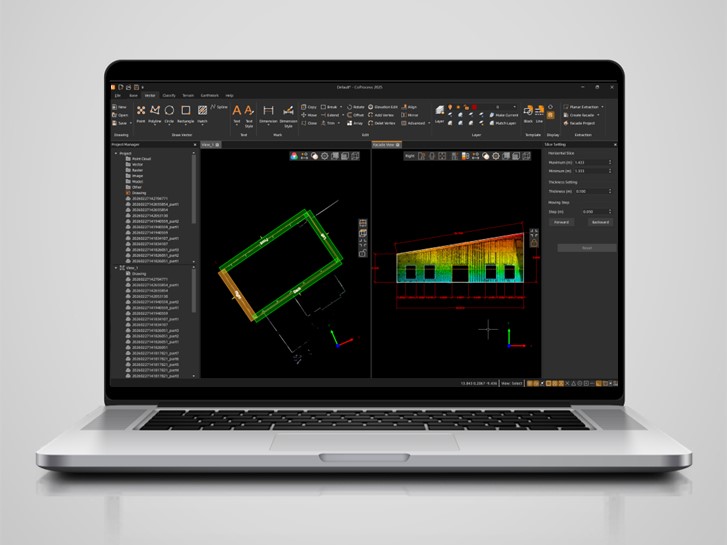
Data vectorisation:CoProcess 2025 provides point cloud management, feature extraction, and CAD deliverable generation (.dwg/.dxf), turning the 3D spatial record into the floor plans, sections, and models that project teams need.
This connected workflow means the data captured by the handheld mobile mapping system moves through a supported pipeline from field acquisition to final deliverable, with each stage designed to work with the RS7's output.
Case Study: 900 Square Meters Renovation Survey in 10 Minutes
A recent project in Indiana, US, put the CHCNAV RS7 through a practical test. The task: capture complete spatial data for a 900 m2 former swimming pool facility being converted into a multi-purpose indoor sports classroom. The project was managed by Renaissance Design Build, Inc., with scanning support from iGage Mapping Corporation.
Left: Renovation site of a former swimming pool facility in Indiana, prepared for conversion into a multi-purpose indoor sports classroom. Top right: Traditional indoor surveying using tape measures, laser distance meters, and manual sketches. Bottom right: Survey with the handheld SLAM scanner enables complete 3D point cloud capture in a single walk-through for fast, accurate indoor mapping.
The comparison between the traditional workflow and the RS7 workflow was significant:
Metric
Traditional Method
CHCNAV RS7
Crew size
3 people
1 operator
Equipment
Tape measure, laser, hand sketch
Handheld SLAM scanner
Data acquisition time
~190 minutes (partial facade only)
10 minutes (full-scene capture)
Coverage
Partial measurements
Complete 3D point cloud
Accuracy
Variable (manual transcription errors)
Within 1 cm
Speed improvement
19x faster with the RS7
The traditional crew spent roughly 190 minutes measuring partial facade dimensions using tape, laser, and hand sketches. A single operator with the RS7 handheld imaging laser scanner completed full-scene data acquisition in 10 minutes, capturing the entire interior with an accuracy of within 1 cm. The resulting point cloud provided a complete spatial record of the facility, usable for floor plans, sections, elevations, and renovation design coordination.
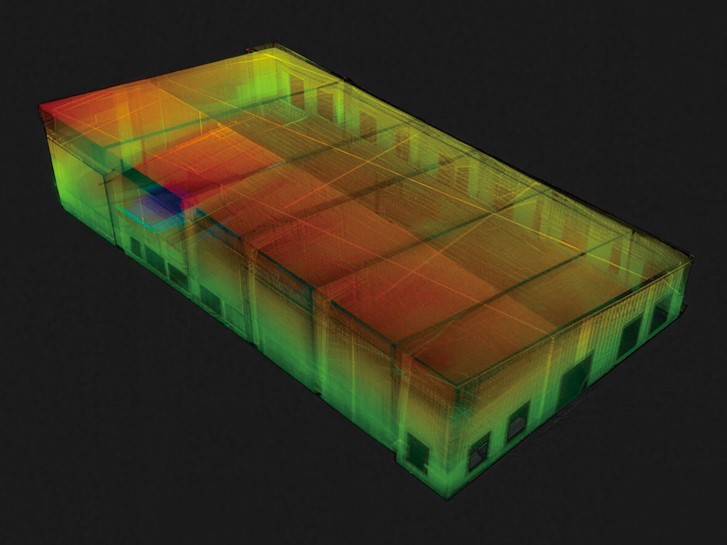
High-density colorised point cloud of the indoor facility captured with the RS7, processed in CoProcess software, providing a complete and reusable 3D spatial record.
1-Year Total Cost of Ownership Comparison
Beyond time savings on a single project, the case study also examined total cost of ownership across a full year of as-built survey work, assuming 24 projects annually:
Cost Factor
Traditional Method
RS7 Scanner Workflow
Annual labour and equipment
$252,000/year
(10 days x 3 crew x $350/day x 24 projects)
$37,200/year
($12,000 equipment + $25,200 labour)
Annual savings
$226,800 (85% cost reduction)
Payback period
1.27 projects
The numbers reflect a scenario where the scanner pays for itself in less than two projects. For firms handling multiple renovation, as-built, or facility documentation projects per year, the cost case is straightforward: the equipment investment is recovered almost immediately, and every subsequent project represents direct savings in labour and time.
Turning One Site Visit into a Reusable 3D Asset
The value of a handheld SLAM scanner for indoor survey is not simply that it is faster than tape and laser. The deeper advantage is structural: it changes what a single site visit produces. Instead of a collection of measurements that serve one purpose, the output is a complete spatial record that serves many.
Floor plans, sections, elevations, 3D models, design coordination documents, and future condition assessments can all be derived from the same dataset. If a question arises six months after the site visit, the point cloud is still available to answer it. There is no need to schedule a return visit or rely on someone's memory of the space.
For teams working in renovation, facility management, heritage documentation, or any discipline where interior conditions must be captured accurately and communicated clearly, this shift from single-use measurements to a reusable 3D asset reduces repeat visits, shortens project timelines, and improves delivery confidence across the board.
Review detailed methodology, data processing steps, and performance metrics from the RS7 indoor scanning project: Download the Full RS7 Case Study
____
About CHC Navigation
CHC Navigation (CHCNAV) develops advanced mapping, navigation, and positioning solutions designed to increase productivity and efficiency. Serving industries such as geospatial, agriculture, machine control and autonomy, CHCNAV delivers innovative technologies that empower professionals and drive industry advancement. With a global presence spanning over 140 countries and a team of more than 2,200 professionals, CHC Navigation is recognized as a leader in the geospatial industry and beyond. For more information about CHC Navigation [Huace:300627.SZ], please visit: https://www.chcnav.com/about/overview
Have a question about our solutions or dealership opportunities?