Tecnologia geoespacial para mapeamento e levantamento topográfico, baseada em sistemas GNSS, LiDAR e UAV, que transformam a captura de dados espaciais em resultados confiáveis.
Um fluxo de trabalho de levantamento interior mais inteligente: Digitalização SLAM portátil com o CHCNAV RS7
2026-04-10
Os projectos de renovação de interiores e as-built raramente falham durante a medição. Mais frequentemente, a incerteza surge mais tarde, quando os registos incompletos do local, os esboços desconexos e a falta de contexto espacial começam a afetar a elaboração, a coordenação e as decisões de design. É aqui que a digitalização SLAM portátil está a ganhar terreno. O scanner portátil SLAM CHCNAV RS7 foi concebido para aplicações em edifícios e interiores, ajudando as equipas a captar dados de alta densidade de interiores e a avançar mais rapidamente para resultados reutilizáveis. O SLAM (Simultaneous Localisation and Mapping) permite ao scanner seguir a sua própria posição enquanto constrói uma nuvem de pontos 3D em tempo real, sem depender de sinais GNSS ou de alvos pré-colocados.
A mudança do fluxo de trabalho: De medições isoladas a um registo espacial reutilizável
Os fluxos de trabalho tradicionais de levantamento de interiores seguem um padrão familiar. Uma equipa chega ao local com fitas métricas, medidores de distância a laser e blocos de notas. Registam as dimensões, fazem esboços e fotografam detalhes importantes. Saem com medições que mais tarde têm de ser interpretadas, redesenhadas e comparadas com esboços que podem não contar toda a história. Se uma dimensão não foi registada ou se a ligação de uma divisão não for clara, é necessário voltar a visitar o local.
Um scanner LiDAR portátil altera fundamentalmente esta dinâmica. Em vez de recolher medições isoladas, o operador percorre o espaço e capta uma nuvem de pontos 3D contínua e de alta densidade. O resultado não é um conjunto de números a ser reconstruído mais tarde. É um registo espacial que suporta plantas, secções, alçados, modelação BIM, coordenação de projectos e validação posterior, tudo a partir do mesmo conjunto de dados.
Isto muda a questão central de "Medimos o suficiente?" para "Quanto podemos fazer com os dados que captámos?" Uma única visita ao local torna-se a criação de um ativo 3D reutilizável, em vez de um exercício de campo único.
O CHCNAV RS7 capta dados contínuos de nuvens de pontos 3D à medida que o operador caminha por espaços interiores, substituindo a medição manual por um registo espacial reutilizável.
Como o RS7 lida com os desafios de digitalização em interiores
Seguimento estável em espaços com poucas caraterísticas
A qualidade da digitalização 3D em interiores depende em grande medida da estabilidade da trajetória. O scanner tem de seguir com precisão a sua própria posição à medida que se desloca pelo edifício. Isto é simples em salas com geometria, mobiliário e caraterísticas arquitectónicas distintas. Torna-se mais difícil em corredores, escadas, percursos de serviços públicos e interiores repetitivos, onde a geometria circundante oferece pontos de referência limitados para o algoritmo SLAM.
O CHCNAV RS7 resolve este problema com uma fusão de INS (Sistema de Navegação Inercial) e processamento SLAM, ancorado por uma IMU de alta precisão com instabilidade de polarização superior a 0,5 graus/h. Isto significa que o scanner mantém estimativas de trajetória estáveis mesmo em espaços geometricamente repetitivos, produzindo nuvens de pontos mais limpas com menos artefactos de alinhamento.
Completar a geometria interior em menos tempo
A velocidade é importante na captação da realidade interior, mas apenas se a cobertura for completa. Tectos em falta, estruturas suspensas ou cantos apertados significam lacunas no conjunto de dados, e as lacunas significam visitas de retorno ou conjecturas durante a elaboração. O RS7 capta até 1,15 milhões de pontos por segundo através de um campo de visão ultra-amplo de 360 x 189 graus. Esta cobertura quase esférica significa que os tectos, cantos e elementos suspensos são captados naturalmente à medida que o operador caminha, sem necessidade de parar, reposicionar ou inclinar o dispositivo.
Para os operadores, isto também significa menos mudanças de postura e menos percursos de digitalização interrompidos. O fluxo de trabalho de passagem permanece fluido, o que contribui para a qualidade da digitalização e para o conforto do operador durante sessões de captura prolongadas.
Da geometria aos produtos visuais
A geometria bruta é essencial, mas muitos intervenientes no projeto também precisam de contexto visual. As câmaras duplas HD de 12 MP com tecnologia binning da Sony permitem que o RS7 capte imagens de alta qualidade, mesmo em ambientes interiores com pouca luz. Estas imagens alimentam as nuvens de pontos coloridas e o 3D Gaussian Splatting (3DGS) através do motor de renderização HPGS 2.0, produzindo modelos visuais fotorrealistas juntamente com os dados geométricos.
Esta camada visual ajuda as equipas a rever acabamentos, aberturas, equipamentos e áreas de circulação sem ter de voltar a visitar o local. Para projectos de levantamento de renovação, onde as condições existentes devem ser comunicadas claramente aos projectistas e empreiteiros, esta combinação de geometria e contexto visual é particularmente valiosa.
Do campo para o escritório: Um fluxo de trabalho de processamento conectado
A captura de dados de qualidade no terreno é apenas uma parte do desafio. O caminho desde a digitalização em bruto até à entrega utilizável deve ser eficiente e bem suportado. O RS7 enquadra-se num fluxo de trabalho de processamento em três etapas:
Planeamento de rotas e aquisição de dados: O software SmartGo trata da recolha de dados e fornece uma pré-visualização da nuvem de pontos em tempo real no terreno, permitindo que os operadores verifiquem a cobertura antes de deixarem o local.
Otimização de dados:O CoPre e o CoCloud tratam da otimização da nuvem de pontos, georreferenciação, colorização e filtragem, preparando os dados em bruto para utilização a jusante.
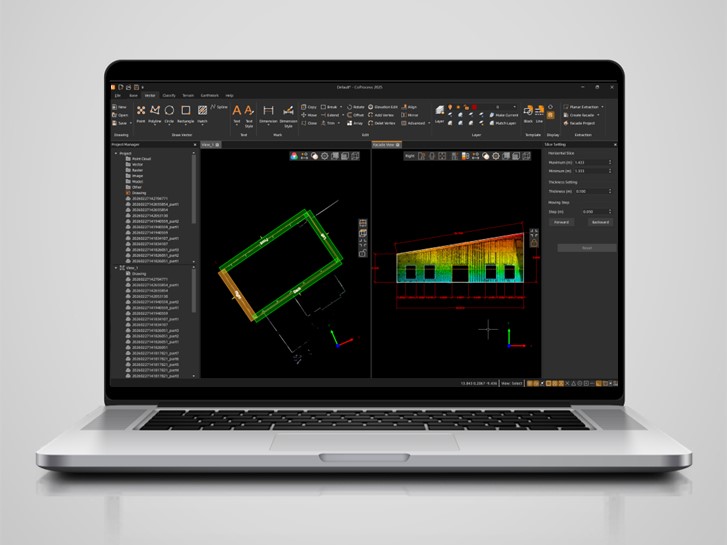
Vectorização de dados:O CoProcess 2025 fornece gestão de nuvens de pontos, extração de caraterísticas e geração de produtos CAD (.dwg/.dxf), transformando o registo espacial 3D em plantas, secções e modelos de que as equipas de projeto necessitam.
Este fluxo de trabalho interligado significa que os dados capturados pelo sistema de cartografia móvel portátil se deslocam através de um pipeline suportado desde a aquisição no terreno até à entrega final, com cada fase concebida para funcionar com os resultados do RS7.
Estudo de caso: Estudo de renovação de 900 metros quadrados em 10 minutos
Um projeto recente em Indiana, EUA, colocou o CHCNAV RS7 à prova. A tarefa: capturar dados espaciais completos para uma antiga instalação de piscinas de 900m2 que estava a ser convertida numa sala de desporto coberta multiusos. O projeto foi gerido pela Renaissance Design Build, Inc., com o apoio de digitalização da iGage Mapping Corporation.
Esquerda: Local de renovação de uma antiga instalação de piscinas em Indiana, preparada para ser convertida numa sala de desporto coberta polivalente. Em cima, à direita: Levantamento tradicional em interiores utilizando fitas métricas, medidores de distância a laser e esboços manuais. Em baixo, à direita: O levantamento com o scanner portátil SLAM permite a captura completa da nuvem de pontos 3D numa única passagem para um mapeamento interior rápido e preciso.
A comparação entre o fluxo de trabalho tradicional e o fluxo de trabalho RS7 foi significativa:
Métrica
Método tradicional
CHCNAV RS7
Tamanho da tripulação
3 pessoas
1 operador
Equipamento
Fita métrica, laser, esboço manual
Scanner portátil SLAM
Tempo de aquisição de dados
~190 minutos (apenas fachada parcial)
10 minutos (captura da cena completa)
Cobertura
Medições parciais
Nuvem de pontos 3D completa
Precisão
Variável (erros de transcrição manual)
Dentro de 1 cm
Melhoria da velocidade
19x mais rápido com o RS7
A equipa tradicional gastou cerca de 190 minutos a medir as dimensões parciais da fachada utilizando fita adesiva, laser e esboços à mão. Um único operador com o RS7 completou a aquisição de dados da cena completa em 10 minutos, capturando todo o interior com uma precisão de 1 cm. A nuvem de pontos resultante forneceu um registo espacial completo das instalações, utilizável para plantas, secções, alçados e coordenação do projeto de renovação.
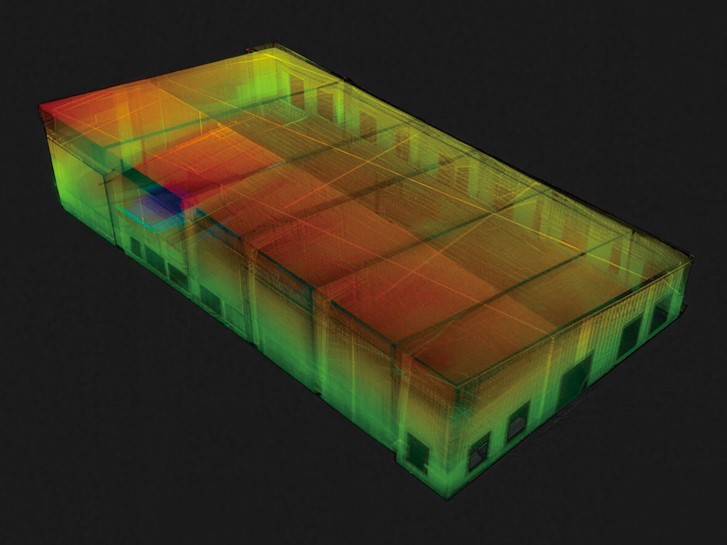
Nuvem de pontos colorida de alta densidade da instalação interior captada com o RS7, processada no software CoProcess, fornecendo um registo espacial 3D completo e reutilizável.
Comparação do custo total de propriedade de 1 ano
Para além da poupança de tempo num único projeto, o estudo de caso também analisou o custo total de propriedade ao longo de um ano inteiro de trabalho de levantamento as-built, assumindo 24 projectos por ano:
Fator de custo
Método Tradicional
Fluxo de trabalho do scanner RS7
Mão de obra e equipamento anuais
$252.000/ano
(10 dias x 3 equipas x $350/dia x 24 projectos)
$37.200/ano
($12.000 de equipamento + $25.200 de mão de obra)
Poupanças anuais
$226.800 (85% de redução de custos)
Período de retorno do investimento
1,27 projectos
Os números reflectem um cenário em que o scanner se paga a si próprio em menos de dois projectos. Para as empresas que lidam com vários projectos de renovação, as-built ou documentação de instalações por ano, o caso dos custos é simples: o investimento no equipamento é recuperado quase imediatamente e cada projeto subsequente representa uma poupança direta em mão de obra e tempo.
Transformar uma visita ao local num ativo 3D reutilizável
O valor de um scanner SLAM portátil para o levantamento de interiores não reside apenas no facto de ser mais rápido do que a fita e o laser. A vantagem mais profunda é estrutural: ele muda o que uma única visita ao local produz. Em vez de uma coleção de medições que servem um objetivo, o resultado é um registo espacial completo que serve muitos.
Plantas baixas, secções, alçados, modelos 3D, documentos de coordenação de projeto e avaliações de condições futuras podem ser derivados do mesmo conjunto de dados. Se surgir uma questão seis meses após a visita ao local, a nuvem de pontos ainda está disponível para lhe dar resposta. Não é necessário agendar uma nova visita ou confiar na memória de alguém sobre o espaço.
Para as equipas que trabalham em renovação, gestão de instalações, documentação do património ou qualquer outra disciplina em que as condições interiores devam ser captadas com precisão e comunicadas de forma clara, esta mudança de medições de utilização única para um ativo 3D reutilizável reduz as visitas repetidas, encurta os prazos dos projectos e melhora a confiança na entrega em todos os aspectos.
Reveja a metodologia detalhada, os passos de processamento de dados e as métricas de desempenho do projeto de digitalização de interiores da RS7: Descarregar o estudo de caso completo do RS7.
____
Sobre a CHC Navigation
A CHC Navigation (CHCNAV) desenvolve soluções avançadas de cartografia, navegação e posicionamento, concebidas para aumentar a produtividade e a eficiência.Servindo indústrias como a geoespacial, a agricultura, o controlo de máquinas e a autonomia,A CHCNAV fornece tecnologias inovadoras que capacitam os profissionais e impulsionam o avanço da indústria.Com uma presença global que abrange mais de 140 países e uma equipa de mais de 2.200profissionais, a CHC Navigation é reconhecida como um líder na indústria geoespacial e não só.Para mais informações sobre a CHC Navigation [Huace:300627.SZ], visite: https: //www.chcnav.com/about/overview
Tem alguma questão sobre as nossas soluções ou oportunidades de concessionário?