Geoespacial
Eleve a precisão e a confiabilidade dos seus projetos geoespaciais com a CHC Navigation.
Saiba mais + Ir para Geoespacial2026-03-23
Os prazos mais apertados dos projectos, o aumento dos custos dos materiais e a contínua escassez de mão de obra tornaram os métodos tradicionais de escavação cada vez mais difíceis de sustentar. O controlo de máquinas por GPS passou de uma ferramenta especializada para um padrão operacional, não porque a tecnologia seja nova, mas porque o custo de trabalhar sem ela continua a aumentar.
Atualmente, a principal questão para os empreiteiros não é se devem adotar o controlo de máquinas, mas qual a abordagem que se adequa à forma como a sua equipa trabalha no local.
A maior parte das ineficiências de escavação tem origem em três problemas recorrentes:
O resultado: a escavação deixa de ser uma tentativa e verificação e passa a ser uma execução controlada e repetível, com um impacto mensurável no custo, no calendário e na segurança do local.
Os modernos sistemas de controlo de máquinas por GPS baseiam-se em duas tecnologias integradas que funcionam em paralelo para fornecer uma orientação precisa e em tempo real na cabina.
Os satélites GNSS fornecem a posição absoluta da máquina no solo. Uma unidade de medição inercial (IMU) a bordo monitoriza continuamente a inclinação, rotação e direção, compensando o movimento da máquina, a vibração e o terreno irregular. Em conjunto, mantêm uma referência espacial estável e precisa em todos os momentos, mesmo em locais de trabalho activos e dinâmicos onde as condições mudam constantemente.
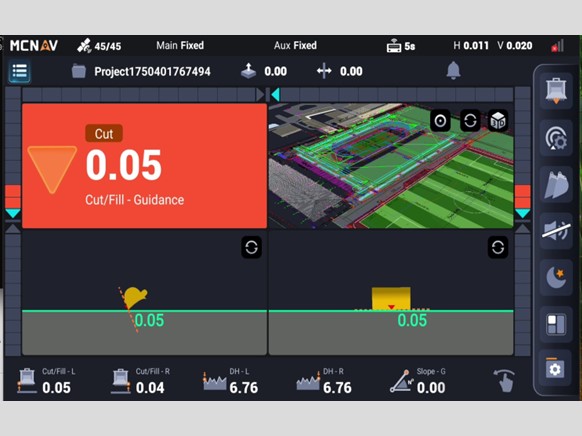
Os sensores montados na lança, no braço e no balde calculam a localização exacta dos dentes do balde em relação à superfície do projeto, momento a momento. O posicionamento RTK proporciona uma precisão ao nível do centímetro, dando aos operadores uma imagem em tempo real do local exato onde o balde se encontra em relação à inclinação. Esta perceção contínua é o que elimina a adivinhação e permite uma escavação precisa na primeira passagem.
Os projectos de escavação não seguem um padrão único. A forma como o trabalho é planeado e executado no local varia significativamente, e o controlo da máquina tem de refletir essa realidade.
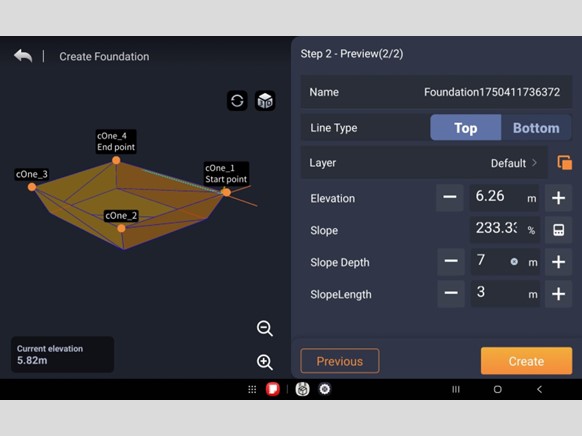
Em projectos de infra-estruturas e engenharia civil, a escavação é conduzida por modelos digitais preparados antes da chegada das máquinas. Estes ambientes requerem um controlo de máquina que possa importar ficheiros de design complexos, apresentar superfícies 3D de forma clara na cabina e manter-se sincronizado com as revisões de design à medida que o projeto evolui.
Os sistemas centrados em dados suportam formatos padrão da indústria (LandXML, DWG, DXF), lidam com configurações de máquinas complexas, incluindo tiltrotators e lanças giratórias, e ligam-se a fluxos de trabalho baseados na nuvem para actualizações de design em tempo real entre o escritório e o terreno.
Nem todos os trabalhos começam com um modelo 3D. A instalação de serviços públicos, a drenagem, a terraplanagem agrícola e os projectos de construção mais pequenos dependem frequentemente de desenhos 2D, elevações de referência ou do julgamento do operador. Para estes fluxos de trabalho, a velocidade e a simplicidade são mais importantes, não a integração profunda de dados.
O controlo da máquina centrado no terreno permite aos operadores definir declives, linhas de referência e superfícies de trabalho diretamente utilizando o balde como referência, sem necessidade de ficheiros de desenho. A configuração é rápida, a formação é curta e a escavação pode começar imediatamente.
O sistema certo depende dos tipos de projectos, do fluxo de trabalho e da equipa. Utilize estes três pontos de decisão como guia:
O retorno do controlo de máquinas por GPS vai muito além da precisão do posicionamento. Os ganhos são mensuráveis em termos de custos, mão de obra e entrega de projectos:
Numa indústria que enfrenta margens mais apertadas e restrições laborais contínuas, estes ganhos acumulam-se rapidamente. Para a maioria dos empreiteiros, o investimento é recuperado logo nos primeiros projectos.
A CHC Navigation (CHCNAV) desenvolve soluções avançadas de cartografia, navegação e posicionamento, concebidas para aumentar a produtividade e a eficiência. Servindo indústrias como a geoespacial, a agricultura, a construção e a autonomia, a CHCNAV fornece tecnologias inovadoras que capacitam os profissionais e impulsionam o avanço da indústria. Com uma presença global que abrange mais de 140 países e uma equipa de mais de 2.200 profissionais, a CHC Navigation é reconhecida como líder na indústria geoespacial e não só. Para mais informações sobre a CHC Navigation [Huace:300627.SZ], visite: https: //www.chcnav.com/about/overview
CHCNAV TX73
Controle 3D para escavadeiras
EasyNAV EMG100
Sistema Simples de Escavação 3D